publications
2022
-
 Graph-Based Knowledge Representation and Algorithms for Air and Maintenance OperationsElla Olsson, Olov Candell, Peter Funk, and 4 more authors33rd Congress of the International Council of the Aeronautical Sciences, ICAS 2022
Graph-Based Knowledge Representation and Algorithms for Air and Maintenance OperationsElla Olsson, Olov Candell, Peter Funk, and 4 more authors33rd Congress of the International Council of the Aeronautical Sciences, ICAS 2022This work presents an approach for information exchange between adjacent air operations domains by means of graph technologies. The approach has the ability to leverage interoperability and collaboration between air- and ground-based systems and stakeholders in respective domains. In its foundation, it provides a means for relevant actors to access and assess relevant data, information and knowledge, and thus provide input in terms of viable action alternatives in a complex and dynamic operational context. As a proof-of-concept, we have utilized a full-stack application framework to implement a decision support demonstrator for operational aircraft maintenance. Our solution facilitates a lightweight and dynamic representation of relevant domain knowledge, readily available for exploitation by graph algorithms, adapted to our domain. We have based our implementation on the full-stack application framework Grand-Stack, which is an architecture designed to exploit the power of graphs throughout its stack.
@article{OlssonICAS2022, title = {Graph-Based Knowledge Representation and Algorithms for Air and Maintenance Operations}, author = {Olsson, Ella and Candell, Olov and Funk, Peter and Sohlberg, Rickard and Castaño Arranz, Miguel and Gustafsson, Mats A. and Bladh, Peter}, journal = {33rd Congress of the International Council of the Aeronautical Sciences, ICAS}, year = {2022}, } -
 Modeling pet behavior during unsupervised walks using a GPS tracker on a domestic catMiguel Castaño Arranz2022
Modeling pet behavior during unsupervised walks using a GPS tracker on a domestic catMiguel Castaño Arranz2022A method for modeling the behavior of a domestic animal in an unsupervised walk is presented. The subject of studies has been a domestic cat. GPS technology has been used to track the animal and determine a set of locations which the animal usually visits during unsupervised walks. The transition between these locations has been modeled as a discrete Markov chain
-
 Convex Optimization for Reviewer Assignment in ConferencesMiguel Castaño Arranz2022
Convex Optimization for Reviewer Assignment in ConferencesMiguel Castaño Arranz2022This paper introduces an Articial Intelligence (AI) for a Reviewer Assignment Problem (RAP) consisting in assigning a review task to each of the authors of a conference. The AI for RAP consists of an Information Retrieval step and an Expertise Matching step. The main contribution of this paper is in casting a novel Convex Expertise Matching (ConvEM) scheme for large scale assignments. ConvEM is based on splitting the Expertise Matching problem in convex sub-problems with equal number of reviewers and papers. The introduced AI for RAP is tested in a case study for a conference with 3051 authors and 1360 papers. The performance of ConvEM is evaluated by comparison with a greedy assignment used as baseline. Finally, this paper discusses the large potential to adapt ConvEM to e.g. i) deal with more generic RAP problems with author quotas and reviewer quotas, and ii) incorporate other research results such as advances in Information Retrieval.
-
 Augmented asset management in railways–Issues and challenges in rolling stockProceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit 2022
Augmented asset management in railways–Issues and challenges in rolling stockProceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit 2022Managing assets in railway, including infrastructure and rolling stock, efficiently and effectively is challenging. The emerging digital technologies and Artificial Intelligence (AI) are expected to augment the decision making in Asset Management (AM) and Fleet Management (FM). The AI technologies need to be adapted to the specific needs of any industrial domain, e.g. railways, to facilitate the implementation and achievement of the overall business goals. This adaptation is denoted as ‘Industrial AI’(IAI). IAI for railways infrastructure and rolling stock, is dependent on an appropriate technology roadmap reflecting necessary know-hows. The IAI roadmap aims to provide a strategic and executive plan to augment managing railway assets i.e. ‘Augmented Asset Management (AAM)’. AAM can be applied through an end-to-end secure platform for e.g. data sharing among stakeholders, the development of analytics, and model sharing through distributed computing. AAM in railways can be enhanced through implementation of a generic fleet management (FM) approach. In the FM approach, any population of assets with common characteristics and also the relationship of the asset to the fleet is considered. This paper aims to develop and propose a concept for AAM enabled through IAI and digital technologies to provide augmented decision support through a secure platform, for AM in railways. A FM approach towards a holistic operation and maintenance of assets, based on a System of Systems thinking, for AAM in railways is applied for population of infrastructure assets and rolling stock assets with common characteristics. Finally, a taxonomy of issues and challenges, in the application of AAM to FM in railways is provided. The data for this taxonomy has been collected from railway organizations through iterative rounds of interviews. This taxonomy can be used for research and development of frameworks, approaches, technologies, and methodologies for AAM in railways.
@article{kumari2022augmented, title = {Augmented asset management in railways--Issues and challenges in rolling stock}, author = {Kumari, Jaya and Karim, Ramin and Thaduri, Adithya and Castaño Arranz, Miguel}, journal = {Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit}, volume = {236}, number = {7}, pages = {850--862}, year = {2022}, publisher = {Sage Publications Sage UK: London, England}, } -
 A Human-Centric Model for Sustainable Asset Management in Railway: A Case StudySustainability 2022
A Human-Centric Model for Sustainable Asset Management in Railway: A Case StudySustainability 2022The ongoing digital transformation is changing asset management in the railway industry. Emerging digital technologies and Artificial Intelligence is expected to facilitate decision-making in management, operation, and maintenance of railway by providing an integrated data-driven and model-driven solution. An important aspect when developing decision-support solutions based on AI and digital technology is the users’ experience. User experience design process aims to create relevance, context-awareness, and meaningfulness for the end-user. In railway contexts, it is believed that applying a human-centric design model in the development of AI-based artefacts, will enhance the usability of the solution, which will have a positive impact on the decision-making processes. In this research, the applicability of such advanced technologies i.e., Virtual Reality, Mixed Reality, and AI have been reviewed for the railway asset management. To carry out this research work, literature review has been conducted related to available Virtual Reality/Augmented Reality/Mixed Reality technologies and their applications within railway industry. It has been found that these technologies are available, but not applied in railway asset management. Thus, the aim of this paper is to propose a human-centric design model for the enhancement of railway asset management using Artificial Intelligence, Virtual Reality, and Mixed Reality technologies. The practical implication of the findings from this work will benefit in increased efficiency and effectiveness of the operation and maintenance processes in railway.
@article{kour2022human, title = {A Human-Centric Model for Sustainable Asset Management in Railway: A Case Study}, author = {Kour, Ravdeep and Casta{\~n}o Arranz, Miguel and Karim, Ramin and Patwardhan, Amit and Kumar, Manish and Granstr{\"o}m, Rikard}, journal = {Sustainability}, volume = {14}, number = {2}, pages = {936}, year = {2022}, publisher = {MDPI}, } -
 Federated Learning for Enablement of Digital Twin14th IFAC Workshop on Intelligent Manufacturing Systems 2022
Federated Learning for Enablement of Digital Twin14th IFAC Workshop on Intelligent Manufacturing Systems 2022Creation, maintenance, and update of digital twins are costly and time-consuming mechanisms. The required effort can be optimized with the use of LiDAR technologies, which support the process of collecting data related to spatial information such as location, geometry, and position. Sharing such data in multi-stakeholder environments is hindered due to competition, confidentiality, and security requirements. Multi-stakeholder environments favor the use of decentralized creation and update mechanisms with reduced data exchange. Such mechanisms are facilitated by Federated Learning, where the learning process is performed at the data owner’s location. Two case studies are presented in this paper, where LiDAR is used to extract information from industrial equipment as a part of the creation of a digital twin.
@article{patwardhan2022federated, title = {Federated Learning for Enablement of Digital Twin}, author = {Patwardhan, Amit and Thaduri, Adithya and Karim, Ramin and Castaño Arranz, Miguel}, journal = {14th IFAC Workshop on Intelligent Manufacturing Systems}, volume = {55}, number = {2}, pages = {114--119}, year = {2022}, publisher = {Elsevier}, }
2020
-
 A generic framework for data quality analyticsMiguel Castaño Arranz, Anna Gustafson, and Hussan Al ChalabiCOMADEM International 2020
A generic framework for data quality analyticsMiguel Castaño Arranz, Anna Gustafson, and Hussan Al ChalabiCOMADEM International 2020The challenge of generalizing Data Quality assessment is hindered by the fact that Data Quality requisites depend on the purpose for which the data will be used and on the subjectivity of the data consumer. The approach proposed in this paper to address this challenge is to employ a semi-automated user-guided Data Quality assessment. This paper introduces a generic framework for data quality analytics which is mainly composed by a set of software units to perform semi-automated Data Quality analytics and a set of Graphical User Interfaces to enable the user to guide the Data Quality assessment. The framework has been implemented and can be customized according to the needs of the purpose and of the consumer. The framework has been instantiated in a case study on Long-hole drill rigs, where several Data Quality issues have been discovered and their root cause investigated
@article{castano2020generic, title = {A generic framework for data quality analytics}, author = {Casta{\~n}o Arranz, Miguel and Gustafson, Anna and Al Chalabi, Hussan}, journal = {COMADEM International}, volume = {23}, number = {1}, year = {2020}, publisher = {COMADEM} } -
 Unsupervised Learning for Subterranean Junction Recognition Based on 2D Point CloudIn 2020 28th Mediterranean Conference on Control and Automation (MED) 2020
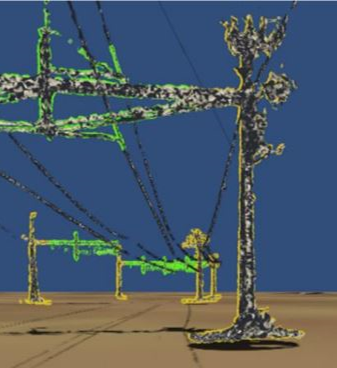
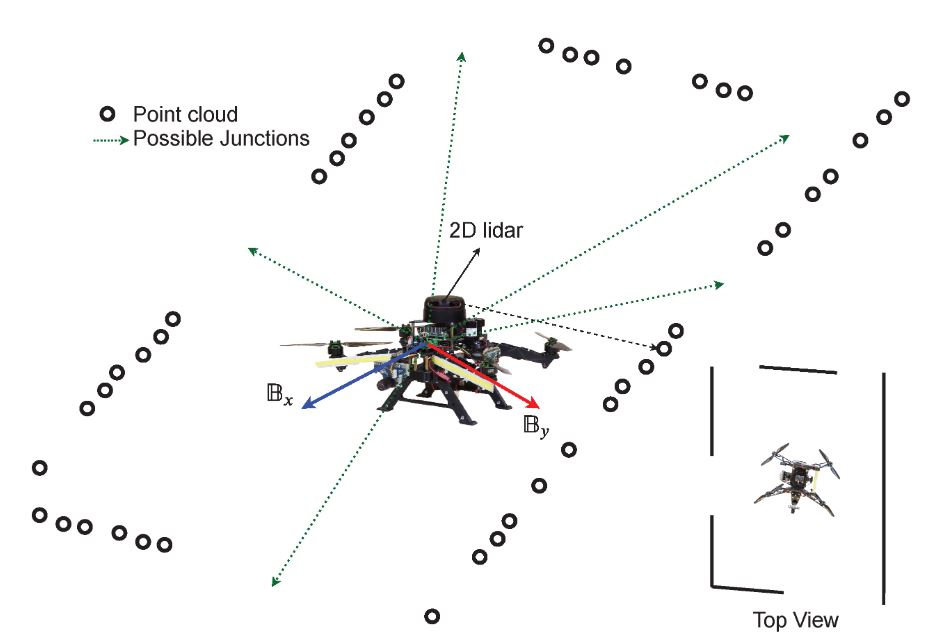
Unsupervised Learning for Subterranean Junction Recognition Based on 2D Point CloudIn 2020 28th Mediterranean Conference on Control and Automation (MED) 2020This article proposes a novel unsupervised learn- ing framework for detecting the number of tunnel junctions in subterranean environments based on acquired 2D point clouds. The implementation of the framework provides valuable information for high level mission planners to navigate an aerial platform in unknown areas or robot homing missions. The framework utilizes spectral clustering, which is capable of uncovering hidden structures from connected data points lying on non-linear manifolds. The spectral clustering algorithm computes a spectral embedding of the original 2D point cloud by utilizing the eigen decomposition of a matrix that is derived from the pairwise similarities of these points. We validate the developed framework using multiple data-sets, collected from multiple realistic simulations, as well as from real flights in underground environments, demonstrating the performance and merits of the proposed methodology.
@inproceedings{mansouri2020unsupervised, title = {Unsupervised Learning for Subterranean Junction Recognition Based on 2D Point Cloud}, author = {Mansouri, Sina Sharif and Pourkamali Anaraki, Farhad and Castaño Arranz, Miguel and Agha-Mohammadi, Ali-Akbar and Burdick, Joel and Nikolakopoulos, George}, booktitle = {2020 28th Mediterranean Conference on Control and Automation (MED)}, pages = {802--807}, year = {2020}, organization = {IEEE}, } -
 Where to look: a collection of methods for MAV heading correction in underground tunnelsIET Image Processing 2020
Where to look: a collection of methods for MAV heading correction in underground tunnelsIET Image Processing 2020Degraded Subterranean environments are an attractive case for miniature aerial vehicles, since there is a constant need to increase the safety operations in underground mines. The starting point for integrating aerial vehicles in the mining process is the capability to reliably navigate along tunnels. Inspired by recent advancements, this paper presents a collection of different, experimentally verified, methods tackling the problem of MAVs heading regulation while navigating in dark and textureless tunnel areas. More specifically, four different methods are presented in this work with the common goal to identify open space in the tunnel and align the MAV heading using either visual sensor in methods a) single image depth estimation, b) darkness contour detection, c) Convolutional Neural Network (CNN) regression and 2D Lidar sensor in method d) range geometry. For the works a)-c) the dark scene in the middle of the tunnel is considered as open space and is processed and converted to yaw rate command, while d) examines the geometry of the range measurements to calculate the yaw rate command. Experimental results from real underground tunnel demonstrate the performance of the methods in the field, while setting the ground for further developments in the aerial robotics community.
@article{kanellakis2020look, title = {Where to look: a collection of methods for MAV heading correction in underground tunnels}, author = {Kanellakis, Christoforos and Mansouri, Sina Sharif and Casta{\~n}o Arranz, Miguel and Karvelis, Petros and Kominiak, Dariusz and Nikolakopoulos, George}, journal = {IET Image Processing}, volume = {14}, number = {10}, pages = {2020--2027}, year = {2020}, publisher = {The Institution of Engineering and Technology} }
2019
-
 Autonomous MAV navigation in underground mines using darkness contours detectionIn International conference on computer vision systems 2019
Autonomous MAV navigation in underground mines using darkness contours detectionIn International conference on computer vision systems 2019This article considers a low-cost and light weight platform for the task of autonomous flying for inspection in underground mine tunnels. The main contribution of this paper is integrating simple, effi- cient and well-established methods in the computer vision community in a state of the art vision-based system for Micro Aerial Vehicle (MAV) navigation in dark tunnels. These methods include Otsu’s threshold and Moore-Neighborhood object tracing. The vision system can detect the position of low-illuminated tunnels in image frame by exploiting the in- herent darkness in the longitudinal direction. In the sequel, it is converted from the pixel coordinates to the heading rate command of the MAV for adjusting the heading towards the center of the tunnel. The efficacy of the proposed framework has been evaluated in multiple experimental field trials in an underground mine in Sweden, thus demonstrating the capability of low-cost and resource-constrained aerial vehicles to fly au- tonomously through tunnel confined spaces
@inproceedings{mansouri2019autonomous, title = {Autonomous {MAV} navigation in underground mines using darkness contours detection}, author = {Mansouri, Sina Sharif and Casta{\~n}o Arranz, Miguel and Kanellakis, Christoforos and Nikolakopoulos, George}, booktitle = {International conference on computer vision systems}, pages = {164--174}, year = {2019}, organization = {Springer, Cham}, } -
 Introduction and Need for Maintenance in Transportation: A Way Towards Smart MaintenanceMiguel Castaño Arranz2019
Introduction and Need for Maintenance in Transportation: A Way Towards Smart MaintenanceMiguel Castaño Arranz2019A smart technology can sense its environment and perform tasks through complex non-conventional reasoning. This leads to subjective and fashionable classifications of technologies as “smart” or “not smart”. Undoubtedly, technologies such as vehicle cruise controllers could have been considered as smart in the past but are now too conventional to be considered as such (Santacana and Rackliffe in Power and Energy, 41–48, 2010). A smart parking technology using RFID technology to check in and check out vehicles (Pala and Inanç in Smart parking applications using RFID technology. 2007 1st Annual RFID Eurasia, 2007) is now very conventional. Complex reasoning is subjective to evaluate, and a general requirement is that smart technology should be able to perform its task which is thought to require human intelligence.
@incollection{grandstrand:2004, author = {Casta{\~n}o Arranz, Miguel}, title = {Introduction and Need for Maintenance in Transportation: A Way Towards Smart Maintenance}, editor = {Singh, Sarbjeet and Martinetti, Alberto and Majumdar, Arnab and Dongen, Leo A. M. van}, booktitle = {Transportation Systems: Managing Performance through Advanced Maintenance Engineering}, publisher = {Springer Singapore}, address = {Singapore}, year = {2019}, pages = {95--111}, } -
 Proceedings of the 5th International Workshop and Congress on eMaintenance: eMaintenance: Trends in Technologies & methodologies, challenges, possibilites and applicationsMiguel Castaño Arranz, and Ramin KarimIn 5th International Workshop and Congress on eMaintenance, Stockholm, Sweden, 14-15 May 2019 2019
Proceedings of the 5th International Workshop and Congress on eMaintenance: eMaintenance: Trends in Technologies & methodologies, challenges, possibilites and applicationsMiguel Castaño Arranz, and Ramin KarimIn 5th International Workshop and Congress on eMaintenance, Stockholm, Sweden, 14-15 May 2019 2019 - Data connectivity challenges for eMaintenance-oriented Digital TwinsJohnny Asber, and Miguel Castaño ArranzIn 5th International Workshop and Congress on eMaintenance, Stockholm, Sweden, 14-15 May 2019 2019
This paper discusses challenges which need to be addressed by the maintenance community such as availability of Big Data solutions, data connectivity and efficient enterprise communications. Addressing such challenges will increase enterprise revenue due to improved availability and reliability.
@inproceedings{asber2019data, title = {Data connectivity challenges for eMaintenance-oriented Digital Twins}, author = {Asber, Johnny and Casta{\~n}o Arranz, Miguel}, booktitle = {5th International Workshop and Congress on eMaintenance, Stockholm, Sweden, 14-15 May 2019}, pages = {104--107}, year = {2019}, organization = {Lule{\aa} University of Technology} } -
 Feature Extraction for eMaintenance of RunestonesMiguel Castaño ArranzIn 5th International Workshop and Congress on eMaintenance, Stockholm, Sweden, 14-15 May 2019 2019
Feature Extraction for eMaintenance of RunestonesMiguel Castaño ArranzIn 5th International Workshop and Congress on eMaintenance, Stockholm, Sweden, 14-15 May 2019 2019The vision in this paper is to boost digitalization of the Swedish runestones by crowdsourcing information (such as images) through a social network app. Such information would allow maintenance contractors to receive updated images of runestones and their surroundings in order to plan maintenance actions. The acquisition of image datasets will allow the training of Artificial Intelligences to e.g.: I) prescribe maintenance actions (e.g. repainting of the carvings), ii) enhance the visibility of degraded runestones through Augmented Reality, iii) use Extended Reality to create a virtual reconstruction of fragmented runestones. Within the context of this vision, this paper focuses on the exploration of computer vision algorithms to extract features from runestone images such as the pattern of their carvings.
@inproceedings{RuenstonesCastano, title = {Feature Extraction for eMaintenance of Runestones}, author = {Casta{\~n}o Arranz, Miguel}, booktitle = {5th International Workshop and Congress on eMaintenance, Stockholm, Sweden, 14-15 May 2019}, year = {2019}, organization = {Lule{\aa} University of Technology}, } -
 Recent advances in Convolutional Neural Networks and open opportunities in eMainteanceMiguel Castaño ArranzIn 5th International Workshop and Congress on eMaintenance 2019
Recent advances in Convolutional Neural Networks and open opportunities in eMainteanceMiguel Castaño ArranzIn 5th International Workshop and Congress on eMaintenance 2019This paper explores how these advances in deep learning open new possibilities for application to maintenance in relation to scarcity of measurements such as: i) the ability to transfer learning between AIs and across disciplines, like the retraining of AlexNet for inspecting bridges ii) using similarity metrics to train certain AIs with just one or few samples of each class (one shot learning), iii) dataset augmentation, iv) automated feature learning as opposed to the traditional feature engineering.
@inproceedings{DeepLearningMaintenanceCastano, title = {Recent advances in Convolutional Neural Networks and open opportunities in eMainteance}, author = {Casta{\~n}o Arranz, Miguel}, booktitle = {5th International Workshop and Congress on eMaintenance}, year = {2019}, organization = {Lule{\aa} University of Technology}, } - Online Sensor and Industrial Systems Connecting Approach: A Global ReviewIn 5th International Workshop and Congress on eMaintenance, 14-15 May, 2019, Stockholm, Sweden 2019
The aim of this paper is to create a state-of-the-art review of the existing standards of open-source communications protocols which enables eMaintenance solutions in the industry. This review includes the explanation of Open O&M (Open Operations & Maintenance) that creates bridges between MIMOSA (Machinery Information Management Open Systems Alliance), the OPC Foundation (Open Protocol Communication), and the ISA SP95 (Instrumentation Systems and Automation Society’s, SP95 Committee), in order to manage the problem under discussion. The understanding of the actual state-of-the-art reveals needs for further advancements of technologies and information standards for the exchange of Open O&M data and linked context. Furthermore, in order to be an active player in the industry, it is strategic to simplify the management and integration of enterprise information resources in a cooperating mode.
@inproceedings{tomas2019online, title = {Online Sensor and Industrial Systems Connecting Approach: A Global Review}, author = {Tom{\'a}s, Diogo and Torres Farinha, Jos{\'e} and Fonseca, In{\'a}cio and Arranz, Miguel Castaño}, booktitle = {5th International Workshop and Congress on eMaintenance, 14-15 May, 2019, Stockholm, Sweden}, pages = {57--62}, year = {2019}, organization = {Lule{\aa} University of Technology} }
2018
-
 Prediction error based interaction measure for control configuration selection in linear and nonlinear systemsMiguel Castaño Arranz, and Wolfgang BirkIFAC-PapersOnLine 2018
Prediction error based interaction measure for control configuration selection in linear and nonlinear systemsMiguel Castaño Arranz, and Wolfgang BirkIFAC-PapersOnLine 2018This paper introduces an Interaction Measure named Prediction Error Index Array (PEIA), which can be applied both to linear and non-linear systems. The linear PEIA is constructed as an extension of previous results using the H2-norm. The non-linear PEIA is an extension for systems represented by Volterra series. Additionally, the paper gives an interpretation of both linear and nonlinear PEIA based on the prediction error of the structurally reduced model which results from the control configuration selection. Examples illustrate and compare the interaction measure with established methodologies, like the Relative Gain Array, participation matrix, and Hankel Interaction Index array.
@article{arranz2018prediction, title = {Prediction error based interaction measure for control configuration selection in linear and nonlinear systems}, author = {Arranz, Miguel Casta{\~n}o and Birk, Wolfgang}, journal = {IFAC-PapersOnLine}, volume = {51}, number = {18}, pages = {446--451}, year = {2018}, publisher = {Elsevier}, }
2017
-
 Automated control configuration selection considering system uncertaintiesAli Kadhim, Miguel Castaño Arranz, and Wolfgang BirkIndustrial & Engineering Chemistry Research 2017
Automated control configuration selection considering system uncertaintiesAli Kadhim, Miguel Castaño Arranz, and Wolfgang BirkIndustrial & Engineering Chemistry Research 2017@article{kadhim2017automated, title = {Automated control configuration selection considering system uncertainties}, author = {Kadhim, Ali and Castaño Arranz, Miguel and Birk, Wolfgang}, journal = {Industrial \& Engineering Chemistry Research}, volume = {56}, number = {12}, pages = {3347--3359}, year = {2017}, publisher = {American Chemical Society} } -
 A survey on control configuration selection and new challenges in relation to wireless sensor and actuator networksMiguel Castaño Arranz, Wolfgang Birk, and George NikolakopoulosIFAC-PapersOnLine 2017
A survey on control configuration selection and new challenges in relation to wireless sensor and actuator networksMiguel Castaño Arranz, Wolfgang Birk, and George NikolakopoulosIFAC-PapersOnLine 2017@article{arranz2017survey, title = {A survey on control configuration selection and new challenges in relation to wireless sensor and actuator networks}, author = {Casta{\~n}o Arranz, Miguel and Birk, Wolfgang and Nikolakopoulos, George}, journal = {IFAC-PapersOnLine}, volume = {50}, number = {1}, pages = {8810--8825}, year = {2017}, publisher = {Elsevier} } -
 On control structure design for a walking beam furnaceHedyeh Jafari, Miguel Castaño Arranz, Thomas Gustafsson, and 1 more authorIn 25th Mediterranean Conference on Control and Automation (MED) 2017
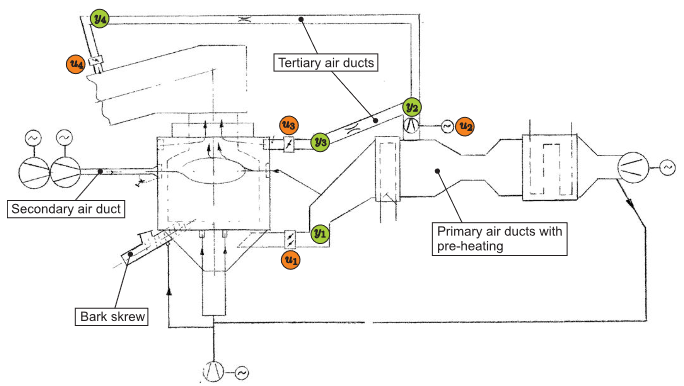
On control structure design for a walking beam furnaceHedyeh Jafari, Miguel Castaño Arranz, Thomas Gustafsson, and 1 more authorIn 25th Mediterranean Conference on Control and Automation (MED) 2017The aim of this article is to introduce a novel sparse controller design for the temperature control of an experimental walking beam furnace in steel industry. Adequate tracking of temperature references is essential for the quality of the heated slabs. However, the design of the temperature control is hindered by the multivariable (non-square) dynamic behavior of the furnace. These dynamics include significant loop interactions and time delays. Furthermore, a novel datadriven model, based on real life experimental data that relies on a subspace state representation in a closed loop approach is introduced. In the sequel, the derived model is utilized to investigate the controller’s structure. By applying the relative gain array approach a decentralized feedback controller is designed. However, in spite of the optimal and sparse design of the controller, there exists interaction between loops. By analyzing the interaction between the inputs-outputs with the σ 2 Gramian-based interaction methodology, a decoupled multi-variable controller is implied. The simulation result, based on the experimental modeling of the furnace, shows that the controller can successfully decrease the interaction between the loops and track the reference temperature set-points.
@inproceedings{jafari2017control, title = {On control structure design for a walking beam furnace}, author = {Jafari, Hedyeh and Casta{\~n}o Arranz, Miguel and Gustafsson, Thomas and Nikolakopoulos, George}, booktitle = {25th Mediterranean Conference on Control and Automation (MED)}, pages = {1355--1360}, year = {2017}, organization = {IEEE} } -
 Online automatic and robust control configuration selectionMiguel Castaño Arranz, and Wolfgang BirkIn IEEE Mediterranean Conference on Control and Automation 2017
Online automatic and robust control configuration selectionMiguel Castaño Arranz, and Wolfgang BirkIn IEEE Mediterranean Conference on Control and Automation 2017This paper presents a complete method for au- tomatic and robust control configuration selection for linear systems which relies upon acquired process data under gaussian noise excitation. The selection of the configuration is based on the estimation of the Interaction Measure named Participation Matrix. This estimation is derived with uncertainty bounds, which allows to determine online whether the uncertainty is sufficiently low to derive a robust decision on the control configuration to be used or if the uncertainty should be reduced by e.g. prolonging the experiment to obtain more data.
@inproceedings{castano2017online, title = {Online automatic and robust control configuration selection}, author = {Casta{\~n}o Arranz, Miguel and Birk, Wolfgang}, booktitle = {IEEE Mediterranean Conference on Control and Automation}, year = {2017} } -
 On guided and automatic control configuration selectionM Castaño Arranz, Wolfgang Birk, and Ali KadhimIn 2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA) 2017
On guided and automatic control configuration selectionM Castaño Arranz, Wolfgang Birk, and Ali KadhimIn 2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA) 2017@inproceedings{arranz2017guided, title = {On guided and automatic control configuration selection}, author = {Arranz, M Casta{\~n}o and Birk, Wolfgang and Kadhim, Ali}, booktitle = {2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA)}, pages = {1--6}, year = {2017}, organization = {IEEE}, } -
 Data-driven modelling, learning and stochastic predictive control for the steel industryDomagoj Herceg, George Georgoulas, Pantelis Sopasakis, and 5 more authorsIn 2017 25th Mediterranean Conference on Control and Automation (MED) 2017
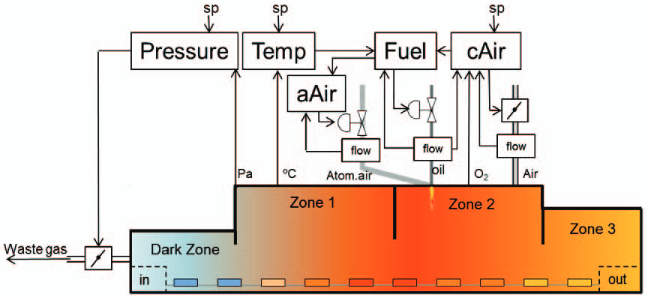
Data-driven modelling, learning and stochastic predictive control for the steel industryDomagoj Herceg, George Georgoulas, Pantelis Sopasakis, and 5 more authorsIn 2017 25th Mediterranean Conference on Control and Automation (MED) 2017The steel industry involves energy-intensive processes such as combustion processes whose accurate modelling via first principles is both challenging and unlikely to lead to accurate models let alone cast time-varying dynamics and describe the inevitable wear and tear. In this paper we address the main objective which is the reduction of energy consumption and emissions along with the enhancement of the autonomy of the controlled process by online modelling and uncertainty-aware predictive control. We propose a risk-sensitive model selection procedure which makes use of the modern theory of risk measures and obtain dynamical models using process data from our experimental setting: a walking beam furnace at Swerea MEFOS. We use a scenario-based model predictive controller to track given temperature references at the three heating zones of the furnace and we train a classifier which predicts possible drops in the excess of Oxygen in each heating zone below acceptable levels. This information is then used to recalibrate the controller in order to maintain a high quality of combustion, therefore, higher thermal efficiency and lower emissions
@inproceedings{herceg2017data, title = {Data-driven modelling, learning and stochastic predictive control for the steel industry}, author = {Herceg, Domagoj and Georgoulas, George and Sopasakis, Pantelis and Casta{\~n}o, Miguel and Patrinos, Panagiotis and Bemporad, Alberto and Niemi, Jan and Nikolakopoulos, George}, booktitle = {2017 25th Mediterranean Conference on Control and Automation (MED)}, pages = {1361--1366}, year = {2017}, organization = {IEEE} } -
 Cloud computing for big data analytics in the Process Control IndustryE Goldin, D Feldman, Georgios Georgoulas, and 2 more authorsIn 25th Mediterranean Conference on Control and Automation (MED) 2017
Cloud computing for big data analytics in the Process Control IndustryE Goldin, D Feldman, Georgios Georgoulas, and 2 more authorsIn 25th Mediterranean Conference on Control and Automation (MED) 2017The aim of this article is to present an example of a novel cloud computing infrastructure for big data analytics in the Process Control Industry. Latest innovations in the field of Process Analyzer Techniques (PAT), big data and wireless technologies have created a new environment in which almost all stages of the industrial process can be recorded and utilized, not only for safety, but also for real time optimization. Based on analysis of historical sensor data, machine learning based optimization models can be developed and deployed in real time closed control loops. However, still the local implementation of those systems requires a huge investment in hardware and software, as a direct result of the big data nature of sensors data being recorded continuously. The current technological advancements in cloud computing for big data processing, open new opportunities for the industry, while acting as an enabler for a significant reduction in costs, making the technology available to plants of all sizes. The main contribution of this article stems from the presentation for a fist time ever of a pilot cloud based architecture for the application of a data driven modeling and optimal control configuration for the field of Process Control. As it will be presented, these developments have been carried in close relationship with the process industry and pave a way for a generalized application of the cloud based approaches, towards the future of Industry 4.0.
@inproceedings{goldin2017cloud, title = {Cloud computing for big data analytics in the Process Control Industry}, author = {Goldin, E and Feldman, D and Georgoulas, Georgios and Castaño, Miguel and Nikolakopoulos, George}, booktitle = {25th Mediterranean Conference on Control and Automation (MED)}, pages = {1373-1378}, year = {2017}, organization = {IEEE}, } -
 On Guided and Automatic Control Configuration Selection: Application on a Secondary Heating SystemMiguel Castaño Arranz, Wolfgang Birk, and Ali Kadhim2017
On Guided and Automatic Control Configuration Selection: Application on a Secondary Heating SystemMiguel Castaño Arranz, Wolfgang Birk, and Ali Kadhim2017This technical report provides supplementary ma- terial to the research paper entitled ”On Guided and Automatic Control Configuration Selection”, presented at the ETFA 2017. In that paper, different Control Configuration Selection (CCS) tools are reviewed and integrated into guided and automatic CCS methodologies. The guided CCS is a heuristic step-by-step methodology to be applied by practitioners, while the automatic CCS methodologies target the adaptation of such heuristics into algorithms which can be run in a computer and assist the practitioners in the decision making. This report summarizes the results of applying the introduced methodologies to a real- life process: the Secondary Heating System. For an introductory background, preliminaries, and details on the methodologies, the reader is referred to the original research paper.
@misc{castano2017guided, title = {On Guided and Automatic Control Configuration Selection: Application on a Secondary Heating System}, author = {Casta{\~n}o Arranz, Miguel and Birk, Wolfgang and Kadhim, Ali}, year = {2017}, publisher = {Technical Report at Luleå University of Technology} } -
 Perspectives and Future Directions in Control Configuration Selection (PiCCS): Workshop NotesWolfgang Birk, Miguel Castaño Arranz, and Bijan Moaveni2017
Perspectives and Future Directions in Control Configuration Selection (PiCCS): Workshop NotesWolfgang Birk, Miguel Castaño Arranz, and Bijan Moaveni2017The PiCCS workshop took place at Luleå University of Technology on 16th and 17th of August 2017. In total 20 researcher and engineers from industry participated in the event. The main aim of the workshop was to bring together expert in the field of Control Configuration Selection (CCS), which is a sub-field in the research area Automatic Control, to discuss the current state of the art and identify remaining challenges in the field. The identified challenges were formulated as future directions and are summarized in this report, together with an account of the discussion during these two days. The workshop explored the following topics Implementing optimal operation using simple control elements, Real time optimisation approach in control structure design and benchmarking, Data driven control configuration selection, and Reconfiguration of control structures. Based on the outcome of the discussion, a group of participants proposed an invited session for the 2018 IFAC AdChem Symposium, which has been accepted at the time of the publication of this report and consists of 6 papers addressing challenges discussed during the workshop.
@article{birk2017perspectives, title = {Perspectives and Future Directions in Control Configuration Selection (PiCCS): Workshop Notes}, author = {Birk, Wolfgang and Casta{\~n}o Arranz, Miguel and Moaveni, Bijan}, year = {2017}, publisher = {Lule{\aa} University of Technology}, }
2016
-
 On the selection of control configurations for uncertain systems using gramian-based interaction measuresMiguel Castaño Arranz, and Wolfgang BirkJournal of Process Control 2016
On the selection of control configurations for uncertain systems using gramian-based interaction measuresMiguel Castaño Arranz, and Wolfgang BirkJournal of Process Control 2016A critical step in the control design of industrial processes is the Control Configuration Selection (CCS), where each actuator is associated with a set of measurements which will be used in the calculation of the control action. A possible solution to the CCS problem is given by the gramian-based Interaction Measures (IMs), which are derived from nominal process models. This paper introduces the derivation of uncertainty bounds for a gramian-based IM using models with uncertainty described in multiplicative form. An alternative to this model-based approach is presented, where uncertainty bounds are estimated from a tailored experiment. In addition, a procedure for robust CCS is introduced. This procedure integrates the calculated uncertainty bounds in the design of the control configuration.
@article{arranz2016selection, title = {On the selection of control configurations for uncertain systems using gramian-based interaction measures}, author = {Castaño Arranz, Miguel and Birk, Wolfgang}, journal = {Journal of Process Control}, volume = {47}, pages = {213--225}, year = {2016}, publisher = {Elsevier} } -
 Dynamic relative gain array estimation using local polynomial approximation approachAli MH Kadhim, Wolfgang Birk, and Miguel Castaño ArranzModeling, Identification and Control 2016
Dynamic relative gain array estimation using local polynomial approximation approachAli MH Kadhim, Wolfgang Birk, and Miguel Castaño ArranzModeling, Identification and Control 2016This article presents a procedure that utilizes the local polynomial approximation approach in the estimation of the Dynamic Relative Gain Array (DRGA) matrix and its uncertainty bounds for weakly nonlinear systems. This procedure offers enhanced frequency resolution and noise reduction when random excitation is used. It also allows separation of nonlinear distortions with shorter measuring time when multisine excitation is imposed. The procedure is illustrated using the well-known quadruple tank process as a case study in simulation and in real life. Besides, a comparison with the pairing results of the static RGA, nonlinear RGA and DRGA based on linearized quadruple tank model for different simulation cases is performed.
@article{kadhim2016dynamic, title = {Dynamic relative gain array estimation using local polynomial approximation approach}, author = {Kadhim, Ali MH and Birk, Wolfgang and Castaño Arranz, Miguel}, year = {2016}, journal = {Modeling, Identification and Control}, volume = {37}, number = {4}, pages = {247--259}, doi = {10.4173/mic.2016.4.5}, publisher = {Norwegian Society of Automatic Control} }
2015
-
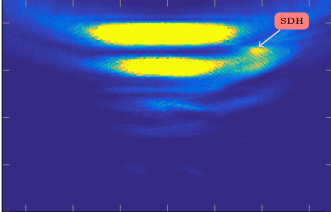 Ultrasonic imaging through thin reverberating materialsBiao Jiang, Johan E Carlson, Miguel Castaño Arranz, and 2 more authorsPhysics Procedia 2015
Ultrasonic imaging through thin reverberating materialsBiao Jiang, Johan E Carlson, Miguel Castaño Arranz, and 2 more authorsPhysics Procedia 2015Imaging through anisotropic or highly heterogeneous materials is challenging for the existence of strong boundary and volume reverberations. To image small cracks or flaws in a reverberating thin layers, high resolution techniques are needed in both temporal and spatial domain, so that the reverberation can be suppressed to some level. In this paper, the reverberation suppression performance of the total focusing beamforming method (TFM) was evaluated by simulation and real data processing. The results showed that the more the focusing point moves away from the array central line, the more multi-reflections can be suppressed. Furthermore, TFM combined with adaptive processing greatly improves the small flaw detection performance. Test results on real samples confirmed the robustness and reverberation suppression capability of the TFM imaging method.
@article{jiang2015ultrasonic, title = {Ultrasonic imaging through thin reverberating materials}, author = {Jiang, Biao and Carlson, Johan E and Castaño Arranz, Miguel and Lindblad, Philip and others}, journal = {Physics Procedia}, volume = {70}, pages = {380--383}, year = {2015}, publisher = {Elsevier} } -
 Control configuration selection for integrating processes using graphsMiguel Castaño Arranz, Wolfgang Birk, and Petter AsplundIn 2015 IEEE Conference on Control Applications (CCA) 2015
Control configuration selection for integrating processes using graphsMiguel Castaño Arranz, Wolfgang Birk, and Petter AsplundIn 2015 IEEE Conference on Control Applications (CCA) 2015Recently, methods for Control Configuration Selection (CCS) using weighted graphs have been introduced. These methods were integrated in a software tool which allows systematic CCS in industry processes by choosing a simplified model with a reduced structure on which control will be based. This paper addresses the extension of these graph-based methods to be applied to integrating systems, which often appear in industry processes, e.g. at storage vessels. The extension is based on restricting the analysis to a set of frequencies of interest which omits the infinite DC-gain. The results are validated and illustrated using a real-life case, namely the secondary heating system of a pulp & paper mill.
@inproceedings{arranz2015control, title = {Control configuration selection for integrating processes using graphs}, author = {Casta{\~n}o Arranz, Miguel and Birk, Wolfgang and Asplund, Petter}, booktitle = {2015 IEEE Conference on Control Applications (CCA)}, pages = {1606--1611}, year = {2015}, organization = {IEEE}, } -
 Relative gain array of weakly nonlinear systems using a nonparametric identification approachIn 2015 IEEE Conference on Control Applications (CCA) 2015
Relative gain array of weakly nonlinear systems using a nonparametric identification approachIn 2015 IEEE Conference on Control Applications (CCA) 2015 -
 Estimation of gramian-based interaction measures for weakly nonlinear systemsMiguel Castaño Arranz, and Wolfgang BirkIn 2015 European Control Conference (ECC) 2015
Estimation of gramian-based interaction measures for weakly nonlinear systemsMiguel Castaño Arranz, and Wolfgang BirkIn 2015 European Control Conference (ECC) 2015 -
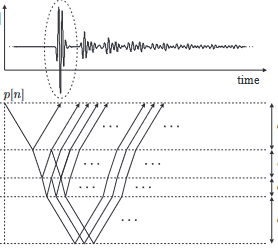 Impulse response extraction and parametric modelling of reverberating ultrasonic echoes from thin layersAziz Kubilay Ovacıklı, Miguel Castaño Arranz, Johan E Carlson, and 3 more authorsIn IEEE International Ultrasonics Symposium (IUS) 2015
Impulse response extraction and parametric modelling of reverberating ultrasonic echoes from thin layersAziz Kubilay Ovacıklı, Miguel Castaño Arranz, Johan E Carlson, and 3 more authorsIn IEEE International Ultrasonics Symposium (IUS) 2015
2014
-
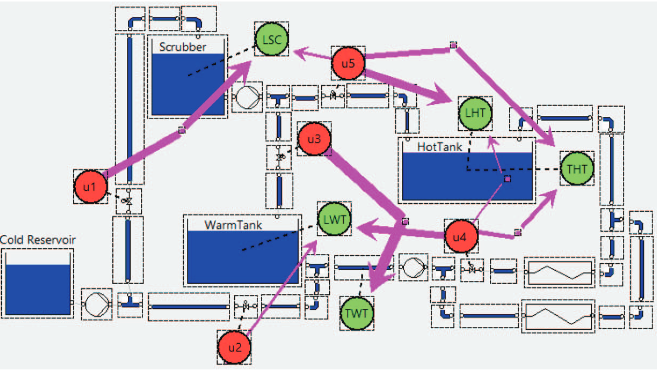
 An application software for visualization and control configuration selection of interconnected processesWolfgang Birk, Miguel Castaño Arranz, and Andreas JohanssonControl Engineering Practice 2014
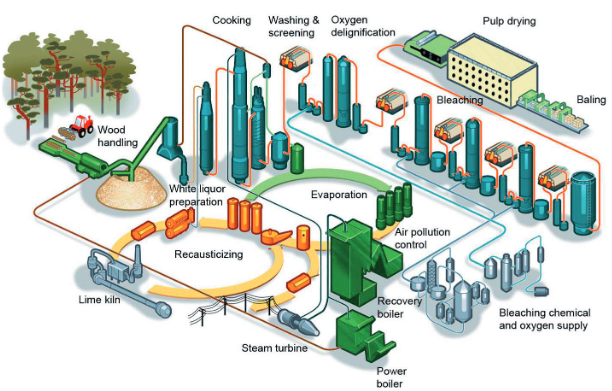
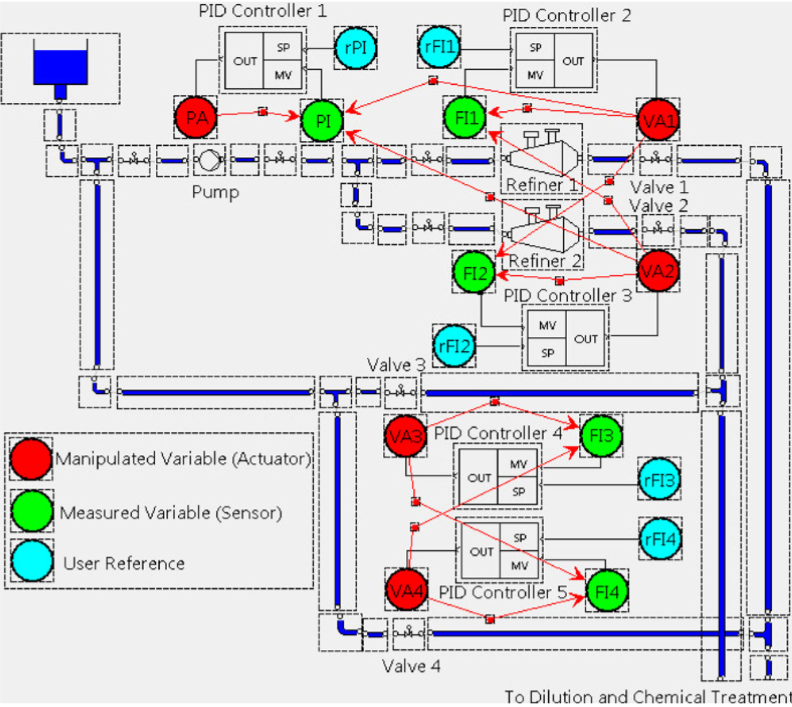
An application software for visualization and control configuration selection of interconnected processesWolfgang Birk, Miguel Castaño Arranz, and Andreas JohanssonControl Engineering Practice 2014This paper presents a new application software for control configuration selection of interconnected industrial processes, called ProMoVis. Moreover, ProMoVis is able to visualize process models and process layout at the physical level together with the control system dynamics. The software consists of a builder part where the visual representation of the interconnected process is created and an analyzer part where the process is analyzed using different control configuration selection tools. The conceptual idea of the software is presented and the subsequent design and implementation of ProMoVis are discussed. The implemented analysis methods are briefly described including their usage and implementation aspects. The use of ProMoVis is demonstrated by an application study on the stock preparation process at SCA Obbola AB, Sweden. The results of this study are compared with the currently used control strategy. The study indicates that ProMoVis introduces a systematic and comprehensive way to perform control configuration selection. ProMoVis has been released under the Apache Open Source license.
@article{birk2014application, title = {An application software for visualization and control configuration selection of interconnected processes}, author = {Birk, Wolfgang and Casta{\~n}o Arranz, Miguel and Johansson, Andreas}, journal = {Control Engineering Practice}, volume = {26}, number = {0}, pages = {188--200}, year = {2014}, publisher = {Elsevier}, } - Systematic Control Configuration Selection of Secondary Heating Systems: A Case StudyMiguel Castaño, Wolfgang Birk, Petter Asplund, and 1 more authorIn Reglermöte 2014
-
 3D synthetic aperture imaging using a water-jet coupled large aperture single transducerMiguel Castaño Arranz, Johan E Carlson, Matti Rantatalo, and 2 more authorsIn 2014 IEEE International Ultrasonics Symposium 2014
3D synthetic aperture imaging using a water-jet coupled large aperture single transducerMiguel Castaño Arranz, Johan E Carlson, Matti Rantatalo, and 2 more authorsIn 2014 IEEE International Ultrasonics Symposium 2014This paper presents a technique for in-situ non-destructive testing of materials with applications in railway crossings. The novelty is in successfully applying the Virtual Source (VS) concept using water jet coupling for a large transducer. By focusing the sound field at the surface of the sample, the water jet probe can be built with a small nozzle opening, limiting the water consumption and making it viable for field applications. The annular geometry of the large transducer ensures the spherical wavefront assumed in the application of the SAFT algorithm, which usually limits the size of the transducer.
@inproceedings{arranz20143d, title = {3D synthetic aperture imaging using a water-jet coupled large aperture single transducer}, author = {Arranz, Miguel Casta{\~n}o and Carlson, Johan E and Rantatalo, Matti and Weston, Miles and Risberg, Robert}, booktitle = {2014 IEEE International Ultrasonics Symposium}, pages = {1372--1375}, year = {2014}, organization = {IEEE} }
2012
-
 Model based and empirical approaches to robust control structure selection based on the H2-normMiguel Castaño, and Wolfgang BirkIn Reglermöte 2012: 13/06/2012-14/06/2012 2012
Model based and empirical approaches to robust control structure selection based on the H2-normMiguel Castaño, and Wolfgang BirkIn Reglermöte 2012: 13/06/2012-14/06/2012 2012 -
 Practical tools for the configuration of control structuresMiguel Castaño ArranzPh.D. Thesis at Luleå Tekniska Universitet 2012
Practical tools for the configuration of control structuresMiguel Castaño ArranzPh.D. Thesis at Luleå Tekniska Universitet 2012Process industries have to operate in a very competitive and globalized environment, requiring efficient and sustainable production processes. Production targets need to be translated into control objectives and are usually formulated as performance specifications of the process. The controller design is a difficult task which involves assumptions and simplifications because of the process complexity. Complexity arises often due to the large scale character of a process, i.e. a pulp and paper mill which can be composed by thousands of control loops. A critical step is the choice of the control configuration, which involves choosing a set of measurements to be used to calculate the control action for each actuator.Current methods for Control Configuration Selection (CCS) include Interaction Measures (IMs). The probably most widely used IM dates back to 1966 when the Relative Gain Array (RGA) was introduced by Bristol. However, these methods rarely become applied in industry, where control structures are often designed based on previous experience or common sense in interpreting process knowledge, but without the support of theoretical and systematic tools.The work in this thesis is oriented towards the development of these tools for industry application. Several topics on CCS are addressed to deal with this lack of practical use, including the robustness to model uncertainty, the need of parametric process models of the complex process, the lack of tools which present the information in connection to the process layout, and the delay from research to education and finally industry application.The main contribution of this thesis is on the consideration of model uncertainty in the CCS problem. Since uncertainty is an intrinsic property of all process models, the validity of the control configuration suggested by the IMs cannot be assessed by only analyzing the nominal model. This thesis introduces methods for the computation of the uncertainty bounds of two gramian-based IMs, which can be used to design robust control configurations.The requirement of process models is an important limitation for the use of the IMs, and the complexity of modeling increases with the number of process variables. This thesis presents novel results in the estimation of IMs, which aim to remove the need of parametric process models for the design of control configurations.CCS using IMs is a heuristic approach, being interpretation needed to select the process interconnections on which control will be based. The traditional IMs present information as an array of real numbers which is disjoint from the process layout. This thesis describes new methods for the interaction analysis of complex processes using weighted graphs, allowing integrating the analysis with process visualization for an increased process understanding.As final contribution, this thesis describes the development of the software tool ProMoVis (Process Modeling and Visualization), which is a platform in which state-of-the-art research in CCS is implemented for facilitating its use in industry applications.
@article{arranz2012practical, title = {Practical tools for the configuration of control structures}, author = {Arranz, Miguel Casta{\~n}o}, year = {2012}, journal = {Ph.D. Thesis at Lule{\aa} Tekniska Universitet} } -
 New methods for interaction analysis of complex processes using weighted graphsMiguel Castaño Arranz, and Wolfgang BirkJournal of Process Control 2012
New methods for interaction analysis of complex processes using weighted graphsMiguel Castaño Arranz, and Wolfgang BirkJournal of Process Control 2012@article{arranz2012new, title = {New methods for interaction analysis of complex processes using weighted graphs}, author = {Castaño Arranz, Miguel and Birk, Wolfgang}, journal = {Journal of Process Control}, volume = {22}, number = {1}, pages = {280--295}, year = {2012}, publisher = {Elsevier} } -
 ProMoVis: a software environment for control structure selection in interconnected processesWolfgang Birk, Miguel Castaño, Tomas Eriksson, and 3 more authorsIn Reglermöte 2012: 13/06/2012-14/06/2012 2012
ProMoVis: a software environment for control structure selection in interconnected processesWolfgang Birk, Miguel Castaño, Tomas Eriksson, and 3 more authorsIn Reglermöte 2012: 13/06/2012-14/06/2012 2012
2011
-
 Bounds on a gramian-based interaction measure for robust control structure selectionCastaño Arranz Miguel, and Wolfgang BirkIn 2011 9th IEEE International Conference on Control and Automation (ICCA) 2011
Bounds on a gramian-based interaction measure for robust control structure selectionCastaño Arranz Miguel, and Wolfgang BirkIn 2011 9th IEEE International Conference on Control and Automation (ICCA) 2011@inproceedings{miguel2011bounds, title = {Bounds on a gramian-based interaction measure for robust control structure selection}, author = {Miguel, Casta{\~n}o Arranz and Birk, Wolfgang}, booktitle = {2011 9th IEEE International Conference on Control and Automation (ICCA)}, pages = {88--93}, year = {2011}, organization = {IEEE} } -
 Empirical approach to robust gramian-based analysis of process interactions in control structure selectionMiguel Castaño Arranz, Wolfgang Birk, and Björn HalvarssonIn 2011 50th IEEE Conference on Decision and Control and European Control Conference 2011
Empirical approach to robust gramian-based analysis of process interactions in control structure selectionMiguel Castaño Arranz, Wolfgang Birk, and Björn HalvarssonIn 2011 50th IEEE Conference on Decision and Control and European Control Conference 2011
2010
-
 Robust methods for control structure selection in paper making processesMiguel Castaño ArranzLicentiate Thesis at Luleå Tekniska Universitet 2010
Robust methods for control structure selection in paper making processesMiguel Castaño ArranzLicentiate Thesis at Luleå Tekniska Universitet 2010Process industries have to operate in a very competitive and globalized environment, requiring efficient and sustainable production processes. As a result, production targets need to be translated into control objectives which are usually formulated as performance specifications of the process, i.e. tracking of references or rejection of process disturbances. This is often a hard and difficult task which involves assumptions and simplications because of the process complexity. Complexity arises often due to the large scale character of a process, i.e. a pulp and paper can host thousands of control loops. A critical step in the design of these loops is the choice of the structure of the control, which means that controllers need to be placed between sensors and actuators.Current methods for control structure selection include the Interaction Measures (IMs). The IMs help the designer to select a subset of the most significant input-output channels, which will form a reduced model on which the control design will be based. The IMs are traditionally evaluated using a nominal model of the process. However, all process models are affected by uncertainties as simplifications and approximations are unavoidable during modeling. Thus, the validity of the control structure suggested by the IMs cannot be assessed by only analyzing the nominal model. The first part of this thesis focuses in analyzing the sensitivity of the IMs to model uncertainties in order to determine a robust control structure which is feasible for all the uncertainty set.It also becomes clear that, control structure selection requires extensive knowledge about how the multiple process variables are interconnected. The second part of this thesis focuses on creating IMs which can help the control designers to understand the propagation of effects in the process, and express this propagation in directed graphs for an intuitive understanding of the process which will help to design a feasible control structure. These methods have been inspired by coherence analysis used in brain connectivity.Neurons and neural populations interact with each other in different brain processes related to events as perception, or cognition. Electroencephalography (EEG) is a measure of electrical activity in the brain which is acquired from sensors positioned on the surface of the head, each of the electrodes collects the aggregated voltage of a neuron population. Analyzing the flow of information between populations of neurons allows to understand the communication between different parts of the brain in different brain processes. In a very similar way, analyzing the flow of information between variables in an industrial process will provide designers with the required information to understand the behavior of the plant.
@article{arranz2010robust, title = {Robust methods for control structure selection in paper making processes}, author = {Arranz, Miguel Casta{\~n}o}, year = {2010}, journal = {Licentiate Thesis at Lule{\aa} Tekniska Universitet} } -
 Uncertainty bounds for gramian-based interaction measuresBjörn Halvarsson, Miguel Castaño Arranz, and Wolfgang BirkIn The 14th WSEAS International Conference on Systems 2010
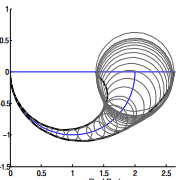
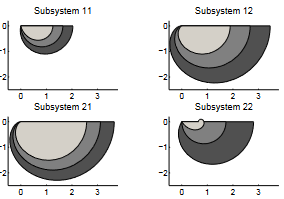
Uncertainty bounds for gramian-based interaction measuresBjörn Halvarsson, Miguel Castaño Arranz, and Wolfgang BirkIn The 14th WSEAS International Conference on Systems 2010Bounds of two Gramian-based Interaction Measures (IM:s) induced by model uncertainty are presented in this paper. The connection between the considered IM:s (the Hankel Interaction Index Array (HIIA) and the Participation Matrix (PM)) is explored, showing that it is possible in certain cases to translate the bounds of one into bounds of the other. The first method is a tightening of previously suggested uncertainty bounds for the HIIA. The second method is based on a novel exploration of the relationship between the PM and the area enclosed by the Nyquist diagram. The latter method is a numerical approximation of the analytical bounds of the PM, whilst the former one provides very loose bounds for the examples presented here.
@inproceedings{halvarsson2010uncertainty, title = {Uncertainty bounds for gramian-based interaction measures}, author = {Halvarsson, Bj{\"o}rn and Casta{\~n}o Arranz, Miguel and Birk, Wolfgang}, booktitle = {The 14th WSEAS International Conference on Systems}, year = {2010} } -
 Interactive modeling and visualization of complex processes in pulp and paper makingIn Control Systems 2010
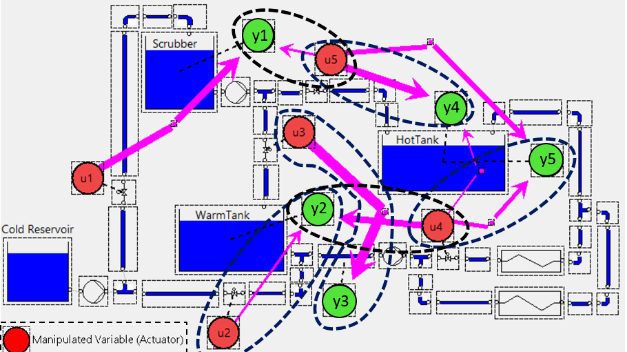
Interactive modeling and visualization of complex processes in pulp and paper makingIn Control Systems 2010This paper discusses a new approach to interactive modeling, visualization and analysis of complex industrial processes. A theoretical framework based on signal flow graphs for modeling and visualization is presented. Using this framework a software tool is designed, called ProMoVis, which can be used to model a process, to visualize the models together with process construction and control system, and to perform analysis regarding e.g. feasible control strategies for the process. Moreover, a case study is conducted, where ProMoVis is used to model, visualize and analyze a stock preparation plant. The results indicate that the proposed methods and tools improve work flows, increase process understanding and simplify decision making on control strategies for complex process.
@inproceedings{birk2010interactive, title = {Interactive modeling and visualization of complex processes in pulp and paper making}, author = {Birk, Wolfgang and Johansson, Andreas and Castaño Arranz, Miguel and R{\"o}nnb{\"a}ck, Stefan and Nordin, Tilda and Ekholm, Nils-Olov}, booktitle = {Control Systems}, year = {2010} }
2009
-
 New methods for structural and functional analysis of complex processesMiguel Castaño Arranz, and Wolfgang BirkIn 2009 IEEE Control Applications,(CCA) & Intelligent Control,(ISIC) 2009
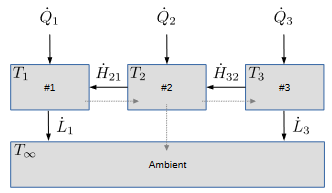
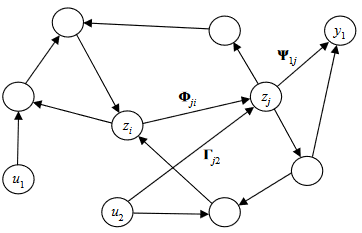
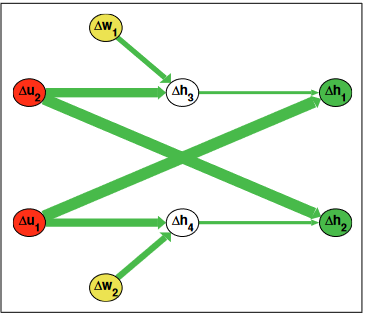
New methods for structural and functional analysis of complex processesMiguel Castaño Arranz, and Wolfgang BirkIn 2009 IEEE Control Applications,(CCA) & Intelligent Control,(ISIC) 2009The selection of the structure of a controller in large scale industry processes requires extensive process knowledge. The aim of this paper is to present methods which help designers to comprehend a process by representing structural and functional relationships from actuators and process disturbances to measured or estimated variables. This paper describes similarities between brain connectivity theory and interaction analysis in multivariable processes. Results from both theories are combined to create new methods for the analysis of industry processes. The developed methods are applied to an illustrative example.
@inproceedings{arranz2009new, title = {New methods for structural and functional analysis of complex processes}, author = {Arranz, Miguel Castaño and Birk, Wolfgang}, booktitle = {2009 IEEE Control Applications,(CCA) \& Intelligent Control,(ISIC)}, pages = {487--494}, year = {2009}, organization = {IEEE} }
2008
-
 A new approach to the dynamic RGA analysis of uncertain systemsMiguel Castaño Arranz, and Wolfgang BirkIn 2008 IEEE International Conference on Computer-Aided Control Systems 2008
A new approach to the dynamic RGA analysis of uncertain systemsMiguel Castaño Arranz, and Wolfgang BirkIn 2008 IEEE International Conference on Computer-Aided Control Systems 2008This paper deals with DRGA analysis for uncer- tain systems. Uncertainties in a process model can be translated into uncertainties in the DRGA which might invalidate the decision on the variable paring in decentralized control. Bounds for the uncertainties in the DRGA of a multivariable process are derived for a given nominal process model with known uncertainty region. The resulting uncertainty region for the DRGA is used to assess the validity of decisions based on the nominal DRGA. The methodology for the computation of the bounds is currently restricted to the 2-by-2 case. Beside an explanatory example, a case study on a coal injection vessel is conducted and discussed.
@inproceedings{arranz2008new, title = {A new approach to the dynamic RGA analysis of uncertain systems}, author = {Arranz, Miguel Castaño and Birk, Wolfgang}, booktitle = {2008 IEEE International Conference on Computer-Aided Control Systems}, pages = {365--370}, year = {2008}, organization = {IEEE} }
2007
-
 Sensitivity of variable pairing in multivariable process control to model uncertaintiesMiguel Castaño ArranzMaster’s Thesis at Luleå University of Technology 2007
Sensitivity of variable pairing in multivariable process control to model uncertaintiesMiguel Castaño ArranzMaster’s Thesis at Luleå University of Technology 2007This project proposes a method for obtaining the variations in the Relative Gain Array (RGA) due to uncertainties in models of 2x2 multivariable systems. The uncertainties are represented as element by element multiplicative uncertainty using the Schur multiplier. An introduction and some references about the background of the project are given, the topics are: uncertainties, decentralized control, decoupling, and interaction measures, with a deeper overview of the RGA.
@article{castano2007sensitivity, title = {Sensitivity of variable pairing in multivariable process control to model uncertainties}, journal = {Master’s Thesis at Lule{\aa} University of Technology}, author = {Castaño Arranz, Miguel}, year = {2007}, }